研究 | 航天彩虹無人機股份有限公司深度分析報告
2025年05年13日
航空產業網 2026-03-11
在無人化產業向“深水區”跨越的關鍵階段,飛行控制系統已從單一的姿態穩定器演變為支撐任務級自主、多源感知融合與嚴苛合規要求的“安全關鍵系統”。本報告系統性梳理了自2019年至今,在全球監管趨嚴、算力平臺躍遷及AI技術滲透背景下,無人飛控系統在模塊化架構、多源感知融合、約束優化控制及高可信安全合規等維度的核心演進邏輯,并為未來3-5年的產業布局提供決策參考。歡迎聯系獲取完整版報告!

報告亮點
全棧架構解析: 對比PX4、ArduPilot等主流開源飛控棧的工程實現,解析從實時操作系統(RTOS)任務調度到1kHz級高頻閉環的確定性時延管理。
控制算法譜系圖譜: 評估比例-積分-微分控制(PID)、模型預測控制(MPC)、魯棒自適應控制及學習型控制(RL)在實機應用中的性能邊界與算力開銷。
多模態感知躍遷: 探討在全球導航衛星系統(GNSS)受限環境下,視覺慣性里程計(VIO)/激光雷達慣性里程計(LIO)緊耦合定位、事件相機等前沿技術如何提升復雜環境下的飛行魯棒性。
全球合規深度對標: 解讀中國《無人駕駛航空器飛行管理條例》、美國Remote ID標準及歐盟風險分類框架對飛控架構的結構性影響。
核心洞察:五大技術主線
報告指出,無人飛控競爭力正從單一算法的先進性,向系統級的“確定性實時閉環”與“退化可控性”轉型。

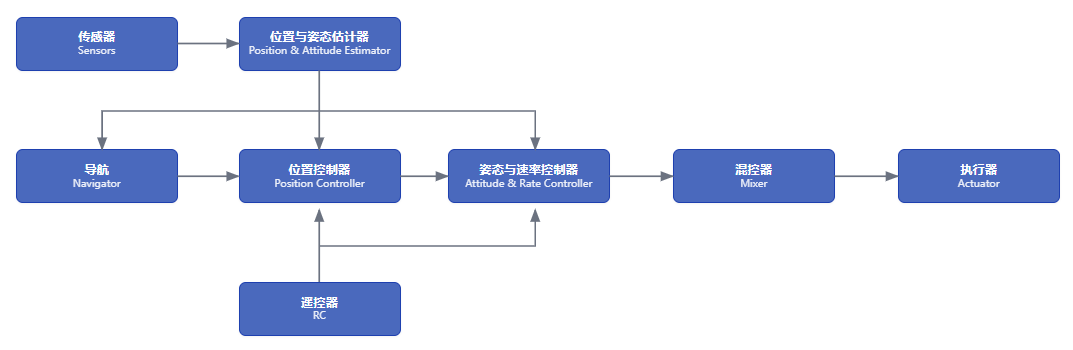
1. 架構演進:飛控實時閉環 + 任務異步擴展
分析“飛控硬實時閉環 + 伴隨計算機任務異步擴展”的主流分層設計趨勢。主流架構已確立“分層計算”模式,將硬實時閉環留在飛控板,而將重感知與規劃任務放在伴隨計算機;飛控硬件普遍采用高性能微控制單元(MCU),集成多IMU、雙氣壓計等冗余配置以降低單點故障風險。
2. 控制算法:約束優化與安全護欄
詳解模型預測控制(MPC)類算法在處理執行器飽和、質量不確定性及風擾方面的顯著優勢。MPC及其魯棒/自適應變體在處理質量變化、風擾及執行器退化方面表現出更強的魯棒性;學習型控制正通過引入“安全過濾器”或“安全包絡”解決分布外風險,實機性能已在無人機競速對抗中達到冠軍級水平。
3. 感知飛躍:從EKF到多模態SLAM
對比從傳統擴展卡爾曼濾波(EKF)到因子圖優化(FGO)的演進,及其在定位精度與實時性間的平衡策略。狀態估計不再局限于飛控內部EKF,視覺與激光雷達已成為位置系統的主來源;新型傳感技術如事件相機,憑借微秒級時間分辨率,正在推動高動態飛行下的低時延感知控制閉環。
4. 集群工程:從控制律走向系統工程
從通信帶寬、時間同步到分布式規劃,剖析大規模無人機集群落地過程中的系統級挑戰。多機協同的瓶頸在于定位基礎設施、通信帶寬與時間同步;通過在機載端實現500Hz的高頻閉環,可顯著降低系統對無線電通信丟包的敏感性。
5. 合規合防:結構化重塑設計邏輯
探討將“安全過濾器”嵌入學習型控制策略,實現自主決策與運行時安全約束的強制滿足。中國自2024年起施行新的運行安全管理規則,強調按風險分級分類管理,并對接綜合監管平臺;Remote ID、鏈路加密(如針對MAVLink的改進)及數據安全已從“可選配置”變為“工程必選項”。
結語
未來3-5年,飛控系統的核心競爭力將體現在可驗證的安全性與多源感知在復雜環境下的退化可控能力。研發的關鍵盲點往往不在于算法優劣,而在于系統級的失效模式是否被充分建模與驗證。
附件:
無人機飛行控制領域深度研究報告.pdf

2025年05年13日

2019年11年08日

2022年05年18日

2024年02年21日

2019年12年02日
2022年07年22日

2019年06年25日

2021年10年18日

2019年06年25日

2025年07年14日



